Sols 4525-4526: The Day After Groundhog Day (Between Ghost Mountain and Texoli, Headed South)
- The NASA Mars rover Curiosity has completed its weekend drive and is now in a stable position to conduct science experiments.
- The rover will use its instruments, including ChemCam/Mastcam, DRT/APXS/MAHLI, and AEGIS LIBS, to collect geochemical and rock texture data from local bedrock blocks and targets.
- Curiosity will also conduct long-distance imaging with the ChemCam RMI to add to its coverage of boxwork sedimentary features and explore a truncated sedimentary horizon on the Texoli butte.
- The rover’s Mastcam instrument will document variations in bedding, color, and texture in nearby bedrock, as well as troughs that provide evidence for sand and dust movement in response to the modern aeolian environment.
- Additionally, Curiosity will conduct observations of the modern environment, including a phase function sky survey to look for scattered light from thin water-ice clouds and cloud altitude observations.
3 min read
Sols 4525-4526: The Day After Groundhog Day (Between Ghost Mountain and Texoli, Headed South)
Written by Lucy Lim, Planetary Scientist at NASA Goddard Space Flight Center
Earth planning date: Monday, April 28, 2025
Curiosity is back on the road! For sols 4525 and 4526, we have an isolated nominal plan in which the communication pass timing works out in such a way that the rover can fit in fully targeted science blocks on both sols rather than just the first sol. So in this power-hungry Martian winter season, we’re in a good position to take advantage of the power saved up during the missed uplink.
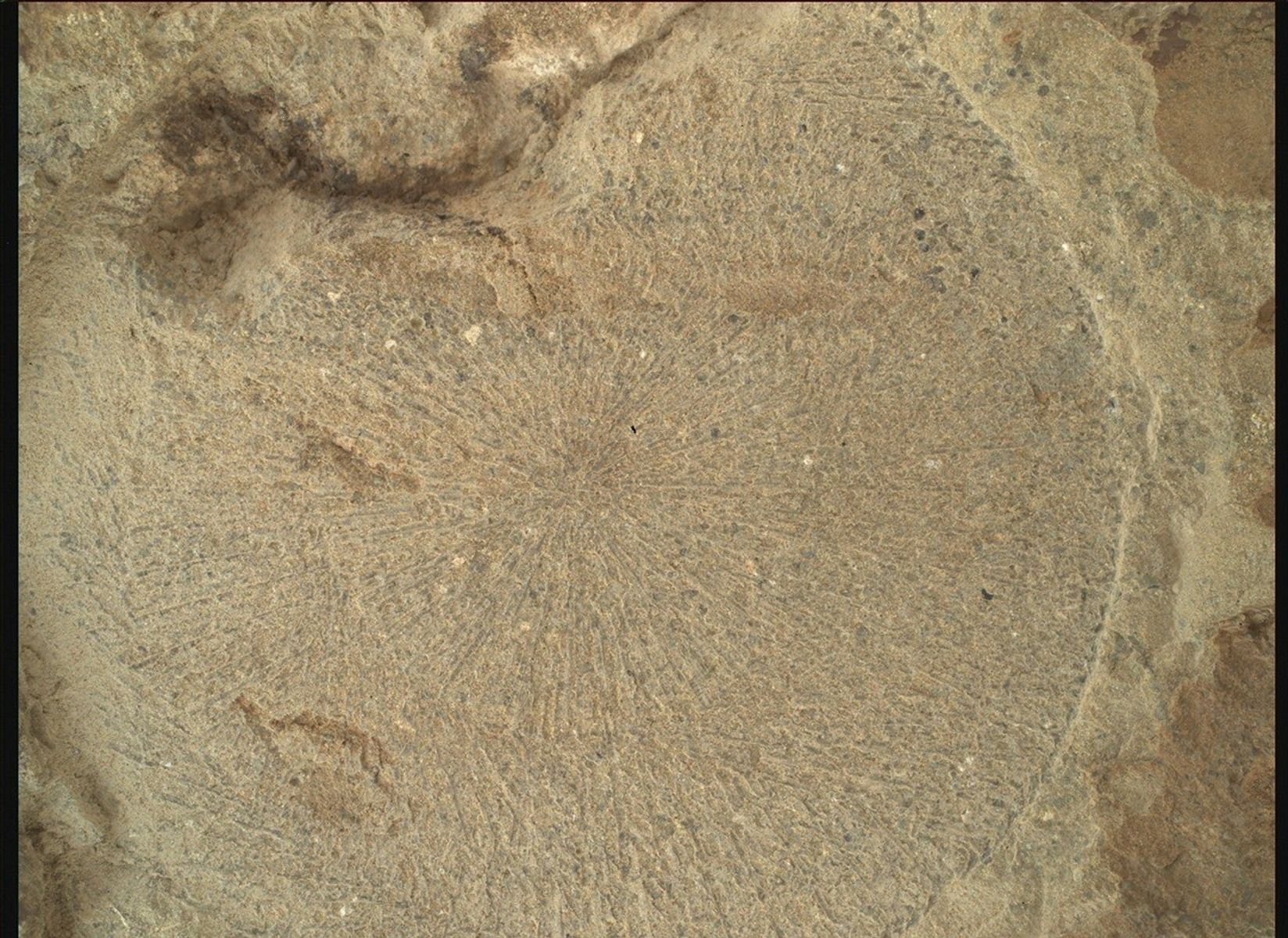
The weekend drive went well and delivered the rover into a stable, arm-work-compatible position in a workspace with rock targets that we could brush with the DRT. Happy days! The DRT/APXS/MAHLI measurements will bring us geochemical and rock texture data from local bedrock blocks “Bradshaw Trail” and “Sweetwater River.” Further geochemical information will come from the ChemCam LIBS rasters on a more coarsely layered target, “Breeze Hill,” and an exposed layer expressing both polygonal features and a vein or coating of dark-toned material, “Laguna Mountain.”
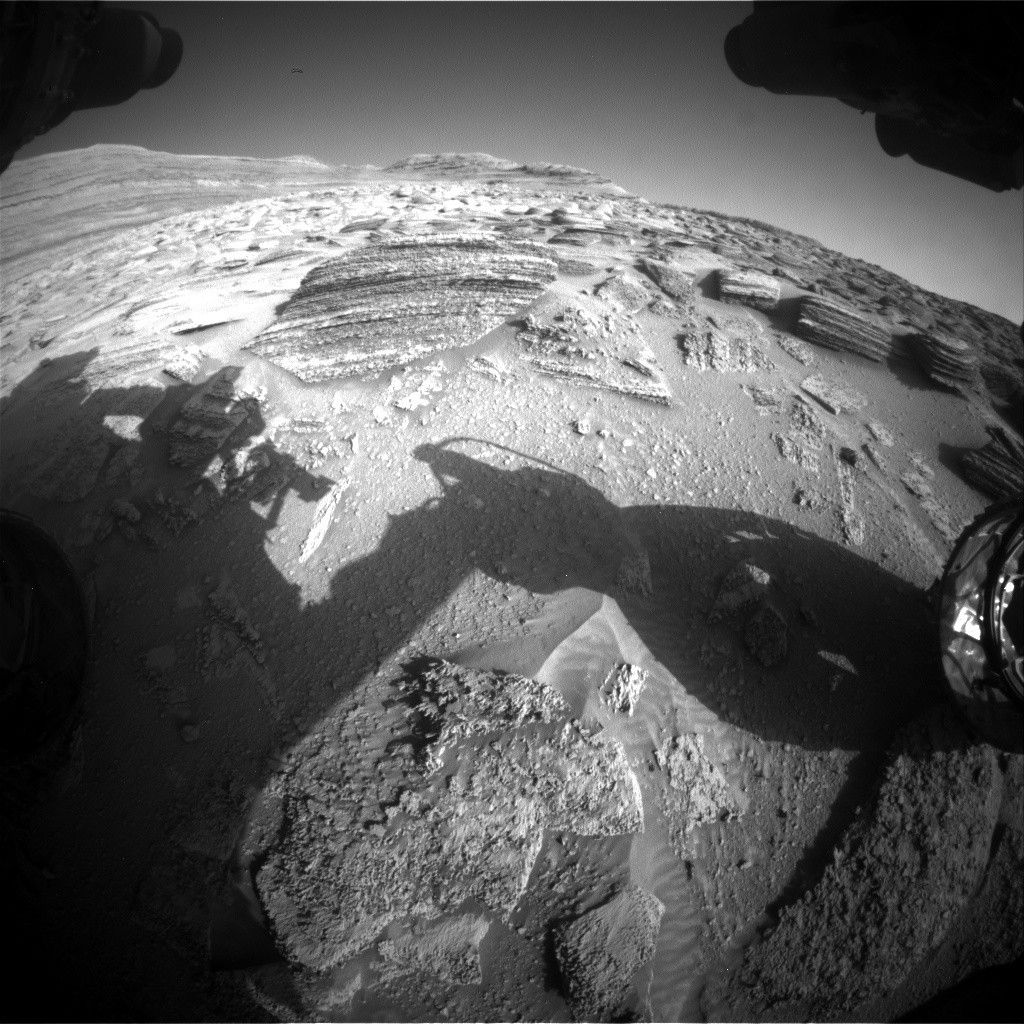
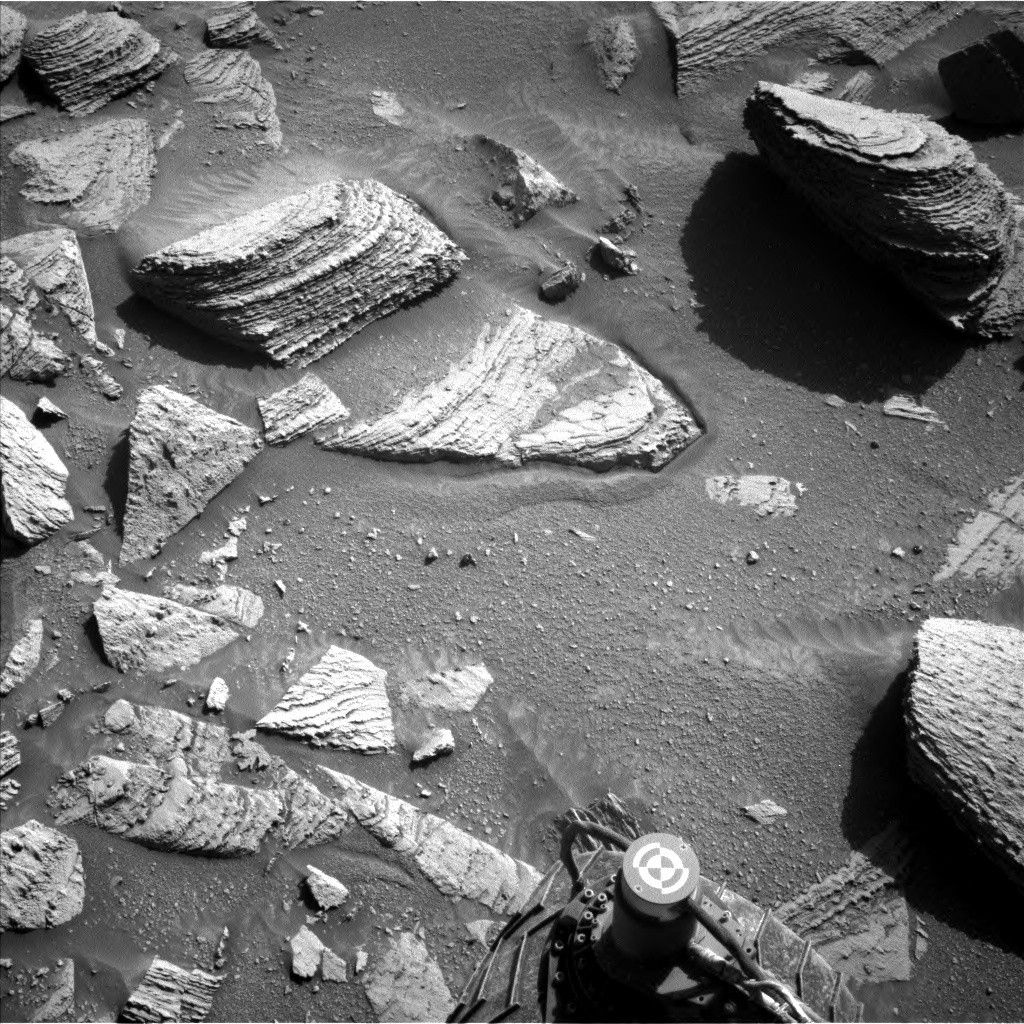
Long-distance imaging with the ChemCam RMI included a mosaic to add to our coverage of the boxwork sedimentary features of the type Curiosity will soon be exploring in situ. A second RMI mosaic was planned to cover a truncated sedimentary horizon on the Texoli butte that may provide further evidence of ancient aeolian scouring events. Meanwhile, the “Morrell Potrero” Mastcam mosaic will provide some detail on the base of the boxwork-bearing “Ghost Mountain” butte and on a ridge nearby. In the drive direction, the “Garnet Peak” mosaic will capture some potentially new rock textures and colors in the upcoming strata.
Nearer-field imaging in the plan includes Mastcam documentation of some troughs that provide evidence for sand and dust movement in response to the modern aeolian environment. Additionally Mastcam mosaics went to “Breeze Hill” (covering the LIBS target) and “Live Oak” to document variations in bedding, color, and texture in the nearby bedrock.
A few observations of the modern environment were scheduled for the afternoon: a phase function sky survey to look for scattered light from thin water-ice clouds and a separate set of cloud altitude observations.
Finally, a Mastcam documentation image was planned for the AEGIS LIBS target from the weekend plan! This reflects an update to the rover’s capability in which the AEGIS target can be determined and downlinked in time for the decisional downlink pass, so that we know where to look for it during the next planning cycle.